Price:
US$79.99
Compatibility
To confirm that this part fits your vehicle, please enter your vehicle's details below.
-
Year:
Select
-
Make:
Select
-
Model:
Select
-
Submodel:
Select
-
Trim:
Select
-
Engine:
Select
- Clear All
Show all compatible vehicles
- Year
- Make
- Model
- Submodel
- Trim
- Engine
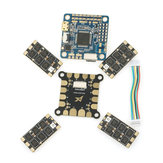
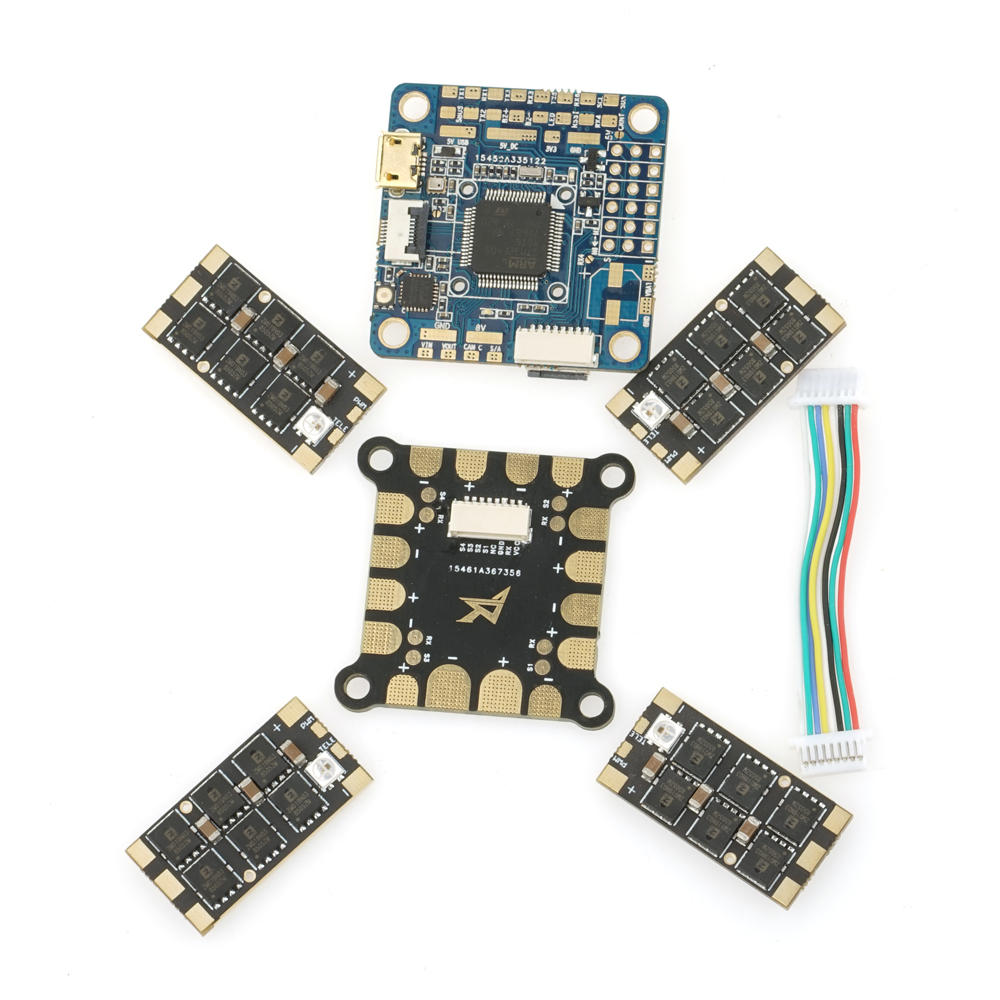
Original Airbot OMNIBUS F4 V6 Flight Controller Furling32 35A 3-6S Blheli_32 Brushless with PDB for RC Drone FPV Racing
Specification:
Brand name: Airbot
Item name: OMNIBUS F4 V6 Flight Controller & Furling32 35A ESC & PDB Board
Flight Controller
User Manual, Download
OMNIBUS F4's upgrade version, using F405 and new target, with 5x UARTs now.
classic OMNIBUS design, using F4 MCU controls OSD over SPI bus, compare the first version, we added BMP280 as barometer and SD Card supports.
OSD Configuration has been incl. in Betaflight GUI.
FC incl. 5V1A BEC on board(3-6s) and 1x 8V BEC for Camera
MPU6000 at SPI bus, Ext, SPI for damped gyro
New version with 8PIN Sh1.0 Socket, could be much easier connect to our 4in1 ESC by one cable.
On v5, we added jumpers for Current source select, please read the manual and set the jumper before using the FC.
Feature:
STM32 F405 MCU, Runs Betaflight 3.0 firmware
SBUS/PPM input (Pinheaders)
6PWM output (1-4Pinheaders and Sh1.0 Plug, 5-6 as Pinheaders)
Only 36x36mm, mount holes 30.5×30.5mm
INCL. BARO BMP280
SPI Sensor MPU6000
Flash
Furling32 – 32bit BLHELI ESC
BLHeli_32 is the third generation BLHeli code, following base BLHeli and BLHeli_S.
BLHeli_32 runs on an ARM 32bit MCU, initially it will be on a Cortex-M0 running at 48MHz, but there are MCUs out there that can run a lot faster.
So what can the increased MCU speed do?
First of all, it can run input signals with lower latency at faster rates.
Dshot up to at least Dshot1200, and at rates up to at least 32kHz is now supported.
Secondly it allows packing of more functionality.
– Like programmable pwm frequency, up to 48kHz, that can run motors even smoother, and also allows for moving of small but potentially disturbing humps in the throttle response. All ESCs have these bumps, with BLHeli_32 they can now be moved in the rpm range, to a place where the system has low sensitivity to them.
– Like auto timing. Which is not the option to choose if you’re after max power. But if you want the most efficient running with very good robustness against desync, it is the perfect choice.
– Like voltage and current limiting. Which is implemented in the code, and will be supported on some ESCs. Voltage limiting is desirable for fixed wing crafts. And current limiting adds protection against ESC failure.
– Like programmable brake on stop force. Which allows control of the braking of fixed wing props.
– Like improved direction change in bidirectional mode.
– Like more to come in the future. Such as setup from the FC by using Dshot commands. Such as telemetry functionality. There is room to grow performance and functionality.
Feature:
Build in Current sensor
On-Board RGB LED (WS2812B LED)
3-6s LIPO input
35A designed
15*30 mm
Package Included:
1 x OMNIBUS F4 V6 Flight Controller
4 x Furling32 – 32bit BLHELI ESC
1 x PDB
1 x Cable



