
Price:
US$36.99
Free Shipping
iFlight 36*36mm SucceX F4 TwinG V2.1 2-6s STM32F405R6T6 Flight Controller Dual ICM20689 with silicon grommets M4 to M3 for FPV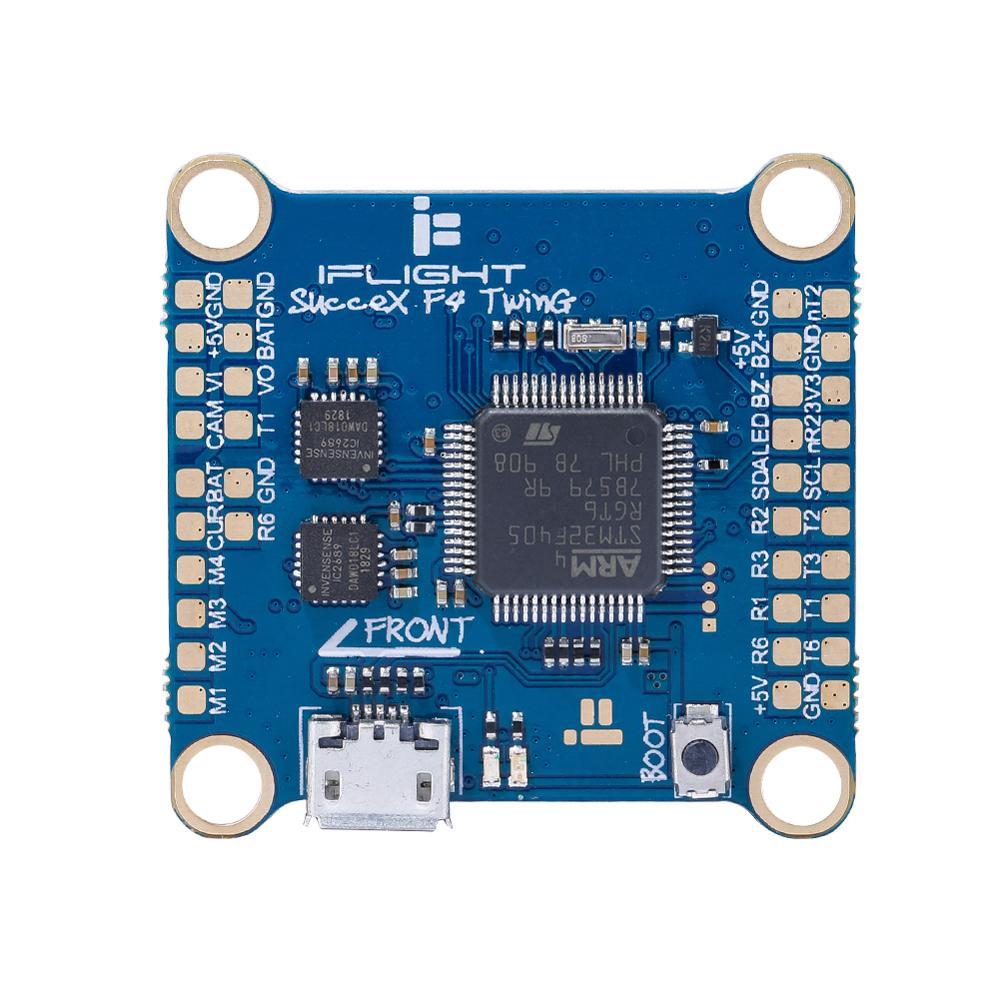

Compatibility
To confirm that this part fits your vehicle, please enter your vehicle's details below.
-
Year:
Select
-
Make:
Select
-
Model:
Select
-
Submodel:
Select
-
Trim:
Select
-
Engine:
Select
- Clear All
This part is compatible with 0 vehicle(s).
Show all compatible vehicles
Show all compatible vehicles
This part is compatible with 1 vehicle(s) matching
This part is not compatible with
Recent searches
- Year
- Make
- Model
- Submodel
- Trim
- Engine
Description:
The SucceX F4 V2.1 TwinG // GY.RO FUSION is the NEXT-GEN flight controller you need for your next build. This FC is ready for anything with 5 uarts, 8 motor outputs, 32Mb blackbox and a powerful F4 processor to run it all.
With its clean intuitive layout, the SucceX F4 V2.1 TwinG makes installation a breeze with a 4 pin connector for your VTX and an 8 pin connector that allows simple plug and play connection with your 4in1 ESC.
But the real magic of this flight controller lies in its TWIN GY.RO configuration.
The TwinG uses two identical gy.ros oriented side by side with one offset 90 degrees from the other. Betaflight uses GY.RO FUSION to blend and average the information from both gy.ros to send a much cleaner signal to the PID loop controller! Less noise and fewer oscillations across the throttle band without adding any delay! Betaflight software filters can be lowered in most cases as well, which brings a significant decrease in delay.
With plenty of processing power and uarts, this is the perfect flight controller for long-ran.ge GPS builds. And the TwinG configuration makes it the perfect Fc for builds like macro quads, cinematic filming rigs and x-class racers that are a bit trickier to tune.
TwinG Gy.ro Setup
-The Betaflight target's default setting is ‘gy.ro_to_use = both’ / Gy.ro fusion is active!
-To check the current setting, please use CLI and type ‘get gyro’ to find the responding entry.
-Change the settings with ‘set gy.ro_to_use = ’ and type ‘save’.
-To get the most reliable performance or en.counter noise, oscillation and bent props: Please use the default setting ‘both”.
-For Single Gy.ro use, please use the debugging options to find and tune for the cleaner gy.ro, but lose the dynamic fusion and averaging.
-BF offers the following dual gy.ro debug options: dual_gy.ro_raw, dual_gy.ro, dual_gy.ro_diff, dual_gy.ro_combined.
-BlackboxLog explorer graph: dual_gy.ro_raw Debugging = [0] Roll Gy.ro1, [1] Pitch Gy.ro1, [2] Roll Gy.ro2, [3] Pitch Gy.ro2.
-The displayed graph will show the Gy.ro_Raw reading (no filters applied), both gyros can be compared.
FC Specifications
MCU:STM32F405R6T6
IMU:Twins IC2689, Twins Gyros built-in(SPI)
OSD: AT7456E
Blackbox: Blackbox logging device
5X Uarts(1 2 3 4 5)with build-in inversion
8X Dshot/Proshot/Oneshot output
8X individual ESC power/ signal pads
1X Group of Gnd/Vbat/M1/M2/M3/M4/Cur/TX
Smart audio & Tramp VTX protocol: YES(IRC Tramp)
WS2812 led Strip: YES
Beeper: YES
PDB Specifications
Input: 2-6S(5-36V)
BEC: 5V/3A cont
FC Firmware
Betaflight
Target: STM32F405
FC: IFRC/IFF4_TWIN_G(STM32F405)
Physical
Mounting: 30.5*30.5mm, φ4mm with Grommets φ3mm
Dimensions: 36*36mm
Weight: 6.3g
Package Included:
1x FC F405
4x silicon grommets M4 to M3
1x 8pin



